

中科院研究人员发明一种新的技术,可以制造形状可编程的磁性软机器人。
磁性软机器人是一种可以在磁场作用下改变形状或执行不同动作的系统。这些机器人有许多优点,包括无线驱动、高灵活性和无限的耐力。
在未来,微尺度磁软机器人可以实现多种设置。例如,帮助人类监控环境或远程执行生物医学程序。然而,迄今为止开发的大多数系统只能完成简单的任务,并具有有限数量的形状。
中国科学院的研究人员最近发明了一种新的技术,用于制造形状可编程的磁性软机器人。这项技术在arXiv上预先发表的一篇论文中概述,并在CCIR2021年会议上展示。这项技术使他们能够基于磁像素创造出一种新的机器人,可以改变形状,完成各种动作或任务。
Zhao 和他的同事们提出的新方法可以创造出可重复编程的磁性软机器人。这种方法背后的关键原理是将用于制造机器人的磁性粒子包裹在相变材料中。
Zhao解释说:“通过改变温度,我们可以根据需要反复‘写入’和‘抹去’磁化曲线。”“利用我们的方法,我们制造了一个可重新编程的磁性软机器人。通过改变弹性体中的磁化曲线,机器人可以产生不同的响应动作。”
Zhao和他的同事们创造的这个机器人由磁性像素、含有液态金属和钕磁铁(NdFeB)的粒子以及硅制成的弹性矩阵组成。研究人员使用一种被称为激光辅助加热的过程,对每个磁像素分别磁化。
Zhao说:“我们的软体机器人的反应动作和功能可以通过编程重新配置。我们可以使用单个像素或多个像素作为独立的磁化曲线;因此,我们的机器人的规模可以跨越很大的范围。通过在磁性像素之间添加柔性铰链,我们使软机器人具有独特的硬化功能。”
采用异质装配方法制造了具有复杂刚度分布和可逆变形的花形软机械。其中三瓣在磁场强度较低时先开花,其余三瓣在磁场强度增加时开花。
研究人员创造的机器人只需切换到“刚体”模式,就可以保持固定的形状。此外,它的磁化和刚度可以很容易地编程。
赵说:“我们创造的技术允许我们的磁性软机器人重新配置其功能,并在软形式和刚性形式之间自由切换,以满足不同任务的需要。”磁软机器人具有一定的“智能”,因此大大增加了其执行任务的范围。
在未来,磁编码技术可用于制造软磁机器人。赵和他的同事已经展示了它的潜力,用它创造了几个基于折纸结构的磁性软机器人。
他们的工作强调了大规模制造磁性、可重复使用和软性机器人的可行性。这些机器人可以特别有用的环境监测,药物运输和体内取样应用。
Zhao补充说:“下一步,我们将进一步缩小机器人的尺寸,并尝试设计一个3D结构。”“我们相信,通用技术的发展将有助于微磁软机器人尽快从实验室走向商业应用。”

 凯美恒发布新一代永磁负压风机,整机一级能效助力厂房节能降温
凯美恒发布新一代永磁负压风机,整机一级能效助力厂房节能降温 中国首台稀土永磁速凝炉退役,见证国产钕铁硼从跟跑到领跑
中国首台稀土永磁速凝炉退役,见证国产钕铁硼从跟跑到领跑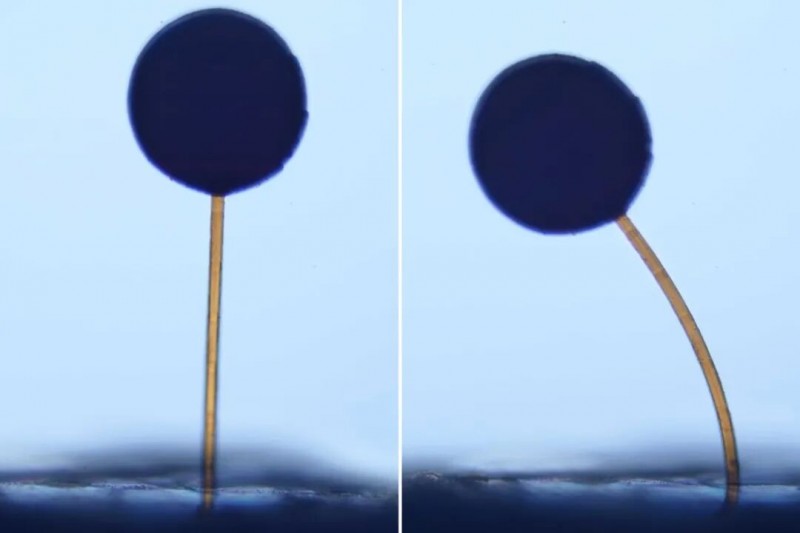 软磁水凝胶微结构能完成抓取和翻转
软磁水凝胶微结构能完成抓取和翻转 我国高频非晶软磁材料研制及产业化应用实现突破
我国高频非晶软磁材料研制及产业化应用实现突破







